

工业机器人已经渗透到各行各业,帮助人们完成焊接、搬运、喷涂、冲压等各项任务,那么你有思考过机器人是怎么做到这一些的吗?它的内部结构又是怎样的呢?今天我们就通过一段动画视频,带大家了解工业机器人的结构和原理。
控制器
SMPS,开关电源提供能量;
CPU模块,控制行动;
伺服驱动模块,控制电流让机器人关节移动;
持续模块,相当于人类的交感神经,接管机器人的安全、迅速控制机器人以及紧急情况停止等;
输入输出模块,相当于检测反应神经,是机器人与外部世界的接口。
工业机器人已经渗透到各行各业,帮助人们完成焊接、搬运、喷涂、冲压等各项任务,那么你有思考过机器人是怎么做到这一些的吗?它的内部结构又是怎样的呢?今天我们就通过一段动画视频,带大家了解工业机器人的结构和原理。
控制器
SMPS,开关电源提供能量;
CPU模块,控制行动;
伺服驱动模块,控制电流让机器人关节移动;
持续模块,相当于人类的交感神经,接管机器人的安全、迅速控制机器人以及紧急情况停止等;
输入输出模块,相当于检测反应神经,是机器人与外部世界的接口。
免责声明:
本网注明转载自互联网及其它来源的作品,目的在于传递更多信息,并不代表本网赞同该观点或对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品第一来源,并自负版权等法律责任。
如资讯内容涉及贵公司版权问题,请在作品发表之日起十五天内联系本网删除,否则视为放弃相关权利。
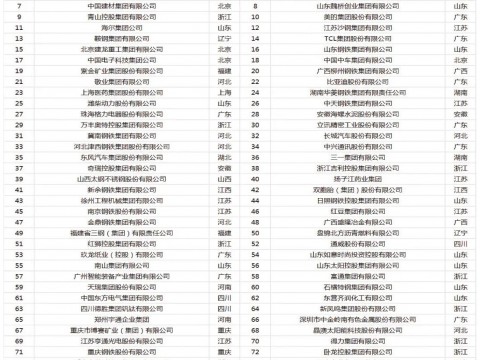
2022年中国装备制造业100强榜单

协作机器人行业内卷的2021,躺平还是开创一个新时

周一至周五 AM9:00 - PM18:00
积分充值:wei.z@wtmro.com
投诉建议:info@wtmro.com

扫码关注或加入QQ群(577347244)





 经营性网站备案信息
经营性网站备案信息 ICP经营许可证
ICP经营许可证 营业执照副本
营业执照副本 不良信息举报中心
不良信息举报中心